
Źródło zdjęcia: IDTechEx,
Czy autonomiczne furgonetki dostawcze lub kapsuły poruszające się po drogach oraz roboty dostarczające przesyłki na ostatnim kilometrze po chodnikach będą rynkiem wartym miliardy dolarów do 2030 roku?
Dr Khasha Ghaffarzadeh, Research Director at IDTechEx, has recently published the below article. This article follows the release of the IDTechEx report – Roboty Mobilne, Pojazdy Autonomiczne i Drony w Logistyce, Magazynowaniu i Dostawach 2020-2040.
Roboty dostawcze na chodnikach na ostatniej mili: rynek wart miliard dolarów do 2030 roku?
Dostawa na ostatnim etapie stanowi najdroższy element łańcucha dostaw, często odpowiadając za ponad 50% całkowitych kosztów. Wynika to głównie z faktu, że jest to najmniej wydajny i najmniej zautomatyzowany etap. W związku z tym wiele podmiotów dąży do wprowadzenia automatyzacji na ostatnim etapie dostawy.
W ostatnich latach wiele firm na całym świecie wprowadza innowacje w zakresie wykorzystania autonomicznych robotów mobilnych, dronów oraz technologii pojazdów autonomicznych. W tym artykule skupiamy się na naziemnych robotach autonomicznych.
This report “MRoboty mobilne, pojazdy autonomiczne i drony w logistyce, magazynowaniu i dostawach 2020-2040” covers the use of mobile robots, drones, and autonomous vehicles in delivery, warehousing, and logistics. It provides a comprehensive analysis of all the key players, technologies, and markets.
Obejmuje to zautomatyzowane oraz autonomiczne wózki i roboty, zautomatyzowane roboty "towar do osoby", roboty autonomiczne i kolaboracyjne, roboty dostawcze, mobilne roboty kompletacyjne, autonomiczne pojazdy do transportu materiałów, takie jak holowniki i wózki widłowe, autonomiczne ciężarówki, furgonetki oraz roboty i drony do dostaw ostatniej mili.
Poniższy obrazek przedstawia różne autonomiczne roboty i pojazdy (czasami nazywane kapsułami) opracowane na całym świecie. Mają one różnorodne kształty i formy, odzwierciedlając różnorodność i szeroki zakres wyborów projektowych i technologicznych, których należy dokonać przy tworzeniu takich produktów.
Roboty dostawcze na chodnikach kontra autonomiczne furgonetki dostawcze
Roboty, kapsuły i pojazdy są zaprojektowane od podstaw do pracy bezzałogowej. Są również prawie zawsze zasilane akumulatorami i napędzane elektrycznie. Dzieje się tak z różnych powodów, w tym: (1) napęd elektroniczny zapewnia lepszą kontrolę ruchu, zwłaszcza gdy każde koło może być sterowane niezależnie; (2) interfejs między elektronicznym systemem sterowania a elektrycznym układem napędowym jest prostszy, eliminując potrzebę stosowania skomplikowanych systemów "by-wire" występujących w autonomicznych pojazdach z silnikami spalinowymi; oraz (3) ich proces produkcji wymaga obsługi znacznie mniejszej liczby części, dzięki czemu mogą się tym zająć mniejsi producenci.
Kolejnym kluczowym wyborem technologicznym i biznesowym jest to, gdzie nawigować. Wiele robotów jest projektowanych do poruszania się po chodnikach i ścieżkach dla pieszych, podczas gdy kapsuły i pojazdy przypominające furgonetki są często projektowane do poruszania się po drogach. Ten wybór miejsca podróży ma decydujące znaczenie dla projektu, wyboru technologii, rynków docelowych i modelu biznesowego. W tym artykule skupiamy się na robotach naziemnych poruszających się po chodnikach, a dyskusję o kapsułach poruszających się po drogach pozostawiamy do kolejnego artykułu.
Roboty chodnikowe to interesująca propozycja. Często są projektowane tak, aby poruszać się z niską prędkością 4-6 km/godz. Ma to na celu zwiększenie bezpieczeństwa, danie robotom więcej czasu na przetwarzanie, umożliwienie zdalnym operatorom interwencji oraz zaklasyfikowanie robota jako urządzenia osobistego (w przeciwieństwie do pojazdu), łagodząc tym samym wyzwania legislacyjne.
Roboty te są również dostępne z różnymi opcjami sprzętowymi. Na przykład, niektóre mają kilka kół, podczas gdy wiele ma sześć kół. Niektóre posiadają pojedynczy przedział na niewielkie ładunki, podczas gdy inne mają większe przedziały do przechowywania wielu przedmiotów. Kluczowym wyborem jest jednak to, jakich czujników percepcji użyć.
Wybory technologii nawigacyjnych
Prawie wszystkie posiadają kamery HD wokół robota, aby dać teleoperatorom możliwość interwencji (więcej na ten temat później). Wszystkie posiadają również IMU i GPS, a większość ma czujniki ultradźwiękowe do wykrywania w bliskim zasięgu. Główny wybór polega na tym, czy użyć tylko lidaru, tylko wizji stereo, czy hybrydowo.
Lidar może dostarczyć doskonałych informacji o zasięgu w pełnym zakresie 360 stopni. Rozdzielczość przestrzenna jest również bardzo wysoka, przewyższając nawet rozwijający się radar obrazowania 4D. Chmura punktów jest również dość gęsta (w zależności od wyboru lidaru), co umożliwia dobre przetwarzanie sygnału. Rzeczywiście, w ostatnich latach poczyniono doskonałe postępy w tworzeniu oznakowanych danych treningowych i technikach uczenia głębokiego opartych na danych lidaru. Lidary mają jednak dwie główne wady: (a) są drogie i (b) mogą mieć ślepy punkt w bliskim polu (kilka cm).
Pierwszy punkt jest kluczowy. Obecnie wysoki koszt lidaru stanowi zagrożenie dla modelu biznesowego. Dzieje się tak dlatego, że aby model biznesowy odniósł sukces, koszt robotów musi być bardzo niski, niezależnie od tego, czy model zakłada świadczenie usługi dostawy RaaS, czy sprzedaż jednostek robotów wraz z pewnymi usługami konserwacji i wsparcia. Dlatego wybór zastosowania lidarów będzie zakładem na drastyczny spadek kosztów technologii lidar.
Większość robotów wykorzystujących lidary stosuje 16-kanałowe lidary RoboSense lub Velodyne. Są to mechaniczne, obracające się lidary, zapewniające widok 360 stopni. Technologia lidarów ewoluuje, pojawiają się nowe rozwiązania, takie jak MEMS czy OPA. Mogą one umożliwić obniżenie kosztów, ale zmniejszą pole widzenia (FoV), co wymagać będzie zastosowania większej liczby jednostek lidarowych na robota. Prognozujemy, że koszt lidarów znacznie spadnie w ciągu najbliższych lat. Może to potencjalnie skierować takie roboty na ścieżkę opłacalności biznesowej. Innym wyzwaniem są martwe pola w bliskim zasięgu. Nie stanowi to problemu w przypadku samochodów, ale może stanowić problem na chodniku, gdzie wiele nisko położonych obiektów może znajdować się blisko robota. Aby to rozwiązać, potrzebne będą uzupełniające czujniki.
Innym podejściem jest rezygnacja z lidaru i wykorzystanie kamery stereoskopowej jako głównego sensora percepcji do nawigacji. Wymaga to opracowania algorytmów opartych na kamerach do lokalizacji, detekcji obiektów, klasyfikacji, segmentacji semantycznej i planowania ścieżki.
Nie istnieje gotowe rozwiązanie programowe. Co więcej, nie istnieje żaden oznaczony zbiór danych szkoleniowych, który pozwoliłby na trenowanie głębokich sieci neuronowych (DNN) opartych na lidarze, kamerach lub hybrydowych, do nawigacji po chodnikach. Środowisko chodnikowe znacznie różni się od środowiska pojazdów drogowych. W związku z tym firmy będą musiały zebrać, skalibrować i skrupulatnie oznaczyć własne zbiory danych. Ponadto, zbiory danych będą wymagały dużej różnorodności, aby uwzględnić różne warunki oświetleniowe, percepcji i lokalne. W związku z tym wdrożenia w wielu miejscach, nawet jako program pilotażowy, są niezbędne do dalszego ulepszania robotów i mogą stanowić przewagę konkurencyjną.
Roboty mają ograniczone zasoby energii. W związku z tym liczba procesorów pokładowych i procesorów graficznych powinna być zminimalizowana, a zadania wymagające dużej mocy obliczeniowej, takie jak tworzenie map 3D i ekstrakcja krawędzi, powinny być przenoszone w tryb offline do potężnych usług. Dzieje się tak niemal zawsze, gdy roboty są wdrażane w nowym środowisku: są one przeprowadzane w celu zebrania danych, które są następnie przesyłane na serwery do przetworzenia, aby mogły zostać przekształcone w odpowiednią mapę, z zaznaczonymi krawędziami, wieloma klasami stałych obiektów, ścieżkami, po których można jeździć, i tak dalej.
Te roboty chodnikowe są jeszcze dalekie od całkowitej autonomii. Po pierwsze, często są wdrażane w środowiskach takich jak kampusy uniwersyteckie w USA, gdzie jest niewielki ruch pieszych, a chodniki są dobrze przygotowane. Wiele robotów jest również ograniczonych do pracy w świetle dziennym i w warunkach bez dużych przeszkód percepcyjnych.
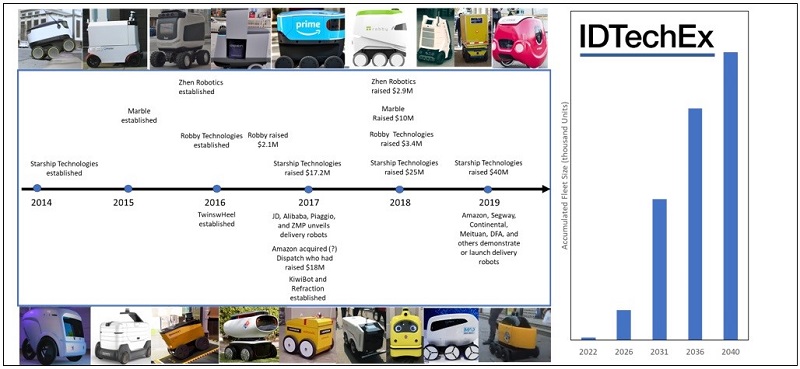 Oś czasu podkreśla różne kluczowe wydarzenia w rozwoju rynku dostaw chodnikowych w latach 2014-2019. Wykres przedstawia skumulowaną wielkość floty wdrożonych robotów — z uwzględnieniem cyklu wymiany — od teraz do 2040 roku. Do 2030 roku rynek sprzętu i usług dostawczych osiągnie wartość miliarda dolarów. Więcej informacji można znaleźć w Roboty Mobilne, Pojazdy Autonomiczne i Drony w Logistyce, Magazynowaniu i Dostawach 2020-2040.
Oś czasu podkreśla różne kluczowe wydarzenia w rozwoju rynku dostaw chodnikowych w latach 2014-2019. Wykres przedstawia skumulowaną wielkość floty wdrożonych robotów — z uwzględnieniem cyklu wymiany — od teraz do 2040 roku. Do 2030 roku rynek sprzętu i usług dostawczych osiągnie wartość miliarda dolarów. Więcej informacji można znaleźć w Roboty Mobilne, Pojazdy Autonomiczne i Drony w Logistyce, Magazynowaniu i Dostawach 2020-2040.
Kluczowe jest również to, że dostawcy posiadają zdalne centra teleoperatorów. Ci zdalni operatorzy, wykorzystując internet, przejmują kontrolę, gdy roboty napotkają sytuacje, z którymi nie mogą sobie poradzić z dużą pewnością. Ponadto, nadal obsługują przejazdy przez skrzyżowania. Ten etap jest bardzo niebezpieczny, a roboty nadal nie są w stanie zawsze wykonywać go samodzielnie. Stosunek operatorów do robotów będzie musiał być utrzymany na absolutnie minimalnym poziomie, aby takie biznesy, które zasadniczo proponują eliminację kosztów płac, stały się opłacalne i zrównoważone.
Długa droga do zyskowności leży przed nami
Ogólnie rzecz biorąc, nadal należy wykonać wiele pracy, aby ulepszyć technologię nawigacji. Roboty będą musiały nauczyć się działać w bardziej złożonych i zróżnicowanych środowiskach przy minimalnej ingerencji. Wymaga to znaczących inwestycji w rozwój oprogramowania. Obejmuje to zbieranie danych, definiowanie klas obiektów, etykietowanie danych oraz trenowanie DNN w wielu środowiskach i warunkach. Wymaga to również napisania algorytmów dla wielu wyzwań, z którymi roboty spotykają się podczas autonomicznego działania.
Ponadto, kapitał jest również niezbędny. Przedsiębiorstwa ponoszą wysokie koszty rozwoju, zwłaszcza koszty oprogramowania. Rynki końcowe są również wysoce konkurencyjne, co narzuca trudne ograniczenia cenowe. Sam sprzęt prawdopodobnie stanie się produktem masowym, a wiele firm zleci produkcję na zewnątrz, gdy tylko ustabilizują odpowiedni projekt końcowy. Wiele z nich zrekompensuje to posiadanie dużej floty robotów do oferowania jako usługa dostawy.
Perspektywy na przyszłość: znaczące możliwości sprzedaży i dostarczania robotów
Jednak nawet takie firmy prawdopodobnie będą miały długą drogę do osiągnięcia rentowności. Powinny ulepszyć roboty, aby działały w większej liczbie scenariuszy niż dobrze oznakowane dzielnice i kampusy, rozszerzyć ich działanie na warunki całodobowe i całodobowe, oraz rozszerzyć autonomiczną pracę z niewielką liczbą błędów do niemal wszystkich scenariuszy, aby obniżyć stosunek liczby operatorów zdalnych do wielkości floty. Wdrożona wielkość floty będzie musiała dramatycznie wzrosnąć, aby zwiększyć dochody z usług dostawczych i umożliwić amortyzację kosztów rozwoju oprogramowania na wiele sprzedanych jednostek.
Przeanalizowaliśmy wszystkie kluczowe firmy i technologie w tej rozwijającej się dziedzinie. Zbudowaliśmy również model prognozy, biorąc pod uwagę, jak produktywność mobilnych robotów ostatniej mili będzie się prawdopodobnie rozwijać na przestrzeni lat. Opracowaliśmy różne scenariusze, oceniając obecną i przyszłą wielkość rynku dostępnego pod względem całkowitej skumulowanej wielkości floty. Nasze prognozy dotyczące wdrożenia floty i wskaźników penetracji opierają się na rozsądnych ocenach rynku i technologii oraz planach rozwoju.
Ogólnie rzecz biorąc, prognozujemy, że do 2035 roku flota będzie liczyła 200 tys. sztuk (z uwzględnieniem wymiany sprzętu). Biorąc pod uwagę poziom gotowości technologicznej, punkt zwrotny nastąpi dopiero około 2025 r. Sugeruje to zarówno duży rynek sprzedaży robotów, jak i jeszcze większy rynek usług dostawczych, pod warunkiem że wykorzystanie aktywów będzie wysokie (w rozsądnym scenariuszu przychody z usług mogłyby osiągnąć 1,6 mld TPL do 2035 r.).
Tym samym nasze prognozy sugerują, że pomimo początkowych wyzwań technologicznych i rynkowych, rynek będzie rósł, a ci, którzy zasiają swoje ziarna dzisiaj, jutro zbiorą owoce. Aby dowiedzieć się więcej o firmach działających w tej dziedzinie, wyzwaniach technologicznych, podejściach i planach, a także szczegółowych prognozach rynkowych na 20 lat, odwiedź Roboty Mobilne, Pojazdy Autonomiczne i Drony w Logistyce, Magazynowaniu i Dostawach 2020-2040.
Niniejszy raport dotyczy wykorzystania robotów mobilnych, dronów i pojazdów autonomicznych w dostawach, magazynowaniu i logistyce. Zawiera kompleksową analizę wszystkich kluczowych graczy, technologii i rynków. Obejmuje zautomatyzowane oraz autonomiczne wózki i roboty, zautomatyzowane roboty typu goods-to-person, roboty autonomiczne i współpracujące, roboty dostawcze, mobilne roboty kompletacyjne, autonomiczne pojazdy do transportu materiałów, takie jak holowniki i wózki widłowe, autonomiczne ciężarówki, furgonetki oraz roboty i drony do dostaw ostatniej mili. Raport zawiera analizę technologii, analizę i prognozy rynkowe oraz przegląd graczy.
Aby dowiedzieć się więcej o nowym raporcie IDTechEx, "Mobile Robots, Autonomous Vehicles, and Drones in Logistics, Warehousing, and Delivery 2020-2040", odwiedź www.IDTechEx.com/Mobile or contact us at Research@IDTechEx.com.
To connect with Dr Ghaffarzadeh and others on this topic, join us at The IDTechEx Show! Europe 2020, 13 – 14 May, Estrel Convention Center, Berlin, Germany. Presenting the latest emerging technologies at one event, with seven concurrent conferences and a single exhibition covering Electric Vehicles, Energy Storage, Graphene, Internet of Things, Printed Electronics, Sensors and Wearable Technology. Please visit www.IDTechEx.com/Europe to find out more and register your place.
![]()













Więcej historii
CES 2026: Trendy w branży motoryzacyjnej skłaniają się ku sztucznej inteligencji w obliczu realiów rynku pojazdów elektrycznych
ACT Expo 2025: Samojezdne półciężarówki z napędem Ai kradną show wśród debat na temat zrównoważonej mobilności
Dołącz i poznaj największe w Ameryce Północnej wydarzenie ACT poświęcone zaawansowanej technologii pojazdów użytkowych.
Fiat Topolino EV: mikrosamochód zaprojektowany z myślą o rozszerzających się czasach zdefiniowanej społeczności
Maserati MC20 Cielo i Grecale SUV wraz z kluczowymi partnerami technologicznymi i audio prezentują włoską doskonałość i innowacje na targach CES 2025
Dwa prototypowe modele Hondy serii 0 będą miały premierę na targach CES 2025
Elektryczny sprzęt ochrony osobistej (PPE) jest rzeczą - wyprodukowany przez OEL Worldwide Industries z siedzibą w Kolorado
Volkswagen ID. Buzz znalazł się na liście TIME najlepszych wynalazków 2024 roku
Cadillac potwierdza, że pierwszym elektrycznym SUV-em z serii V będzie LYRIQ-V z 2026 r.
Stellantis inwestuje $29,5 miliona w innowacyjną technologię tunelu aerodynamicznego w celu poprawy aerodynamiki pojazdów elektrycznych
Linia modelowa Mercedes-Benz 2025: optymalna równowaga aktualizacji wydajności elektrycznej
Hyundai Motor Company i Škoda Group będą współpracować nad rozwojem wodoru i energooszczędnymi rozwiązaniami dla mobilności